Robust Trajectory Tracking for Quadrotor using Sliding Mode Control

The Crazyflie 2.0 quadcopter
Description
Traditional sliding mode controllers for SISO systems can rely on a general control method for control affine systems.
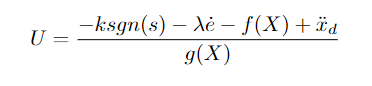

A control law is derived, different from the general form, that would allow for a lower control input, faster convergence, and more intuitive way to ensure robustness using an appropriate sigmoid function, Sg.
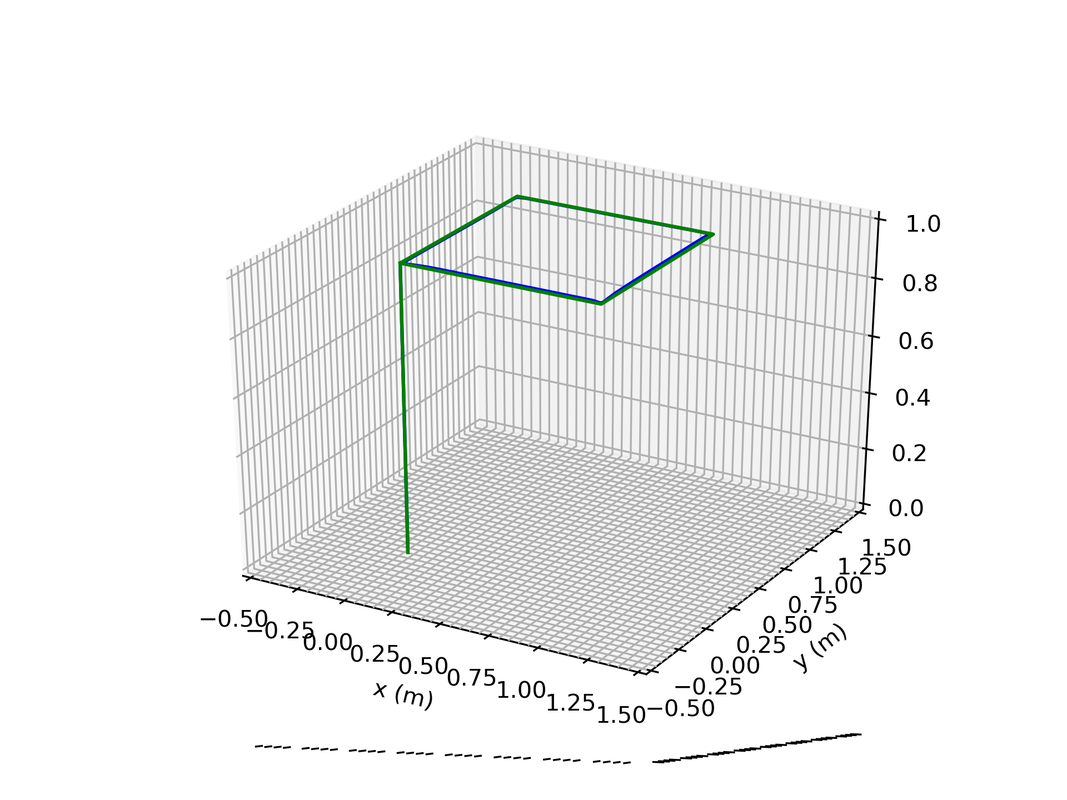
This was simulated in ROS (Gazebo) using a crazyflie 2.0 quadrotor with the desired upwards thrust determined using the modified control law.
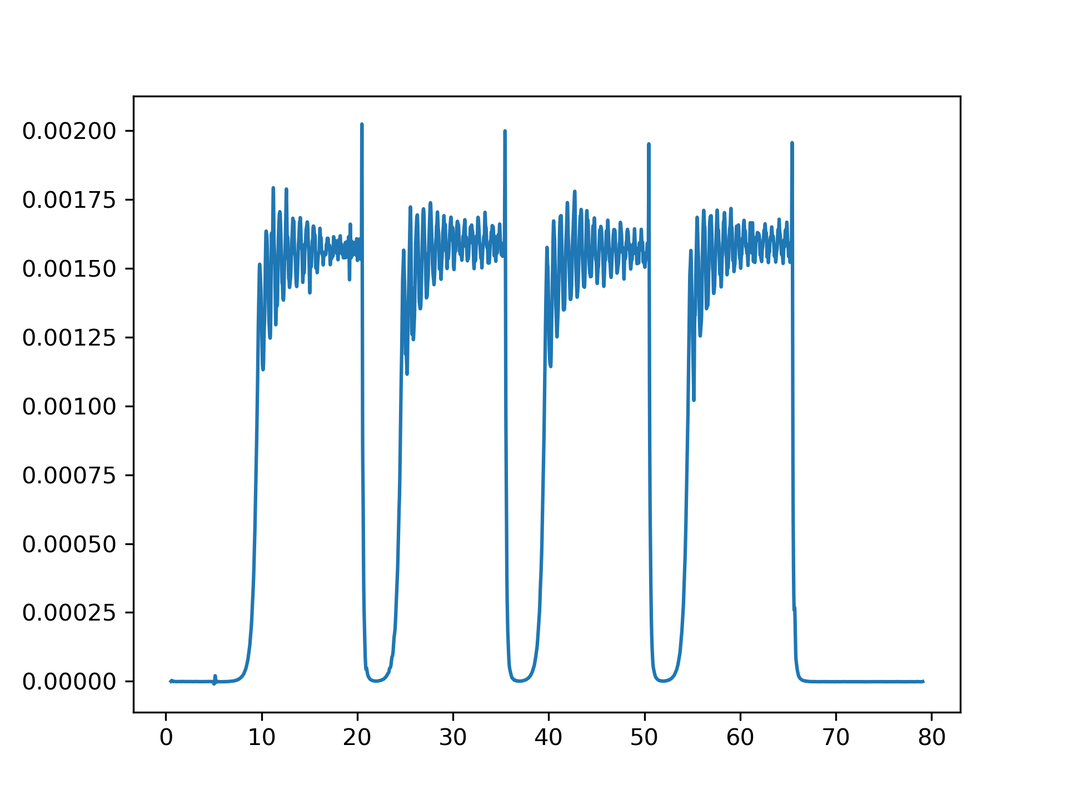
Results