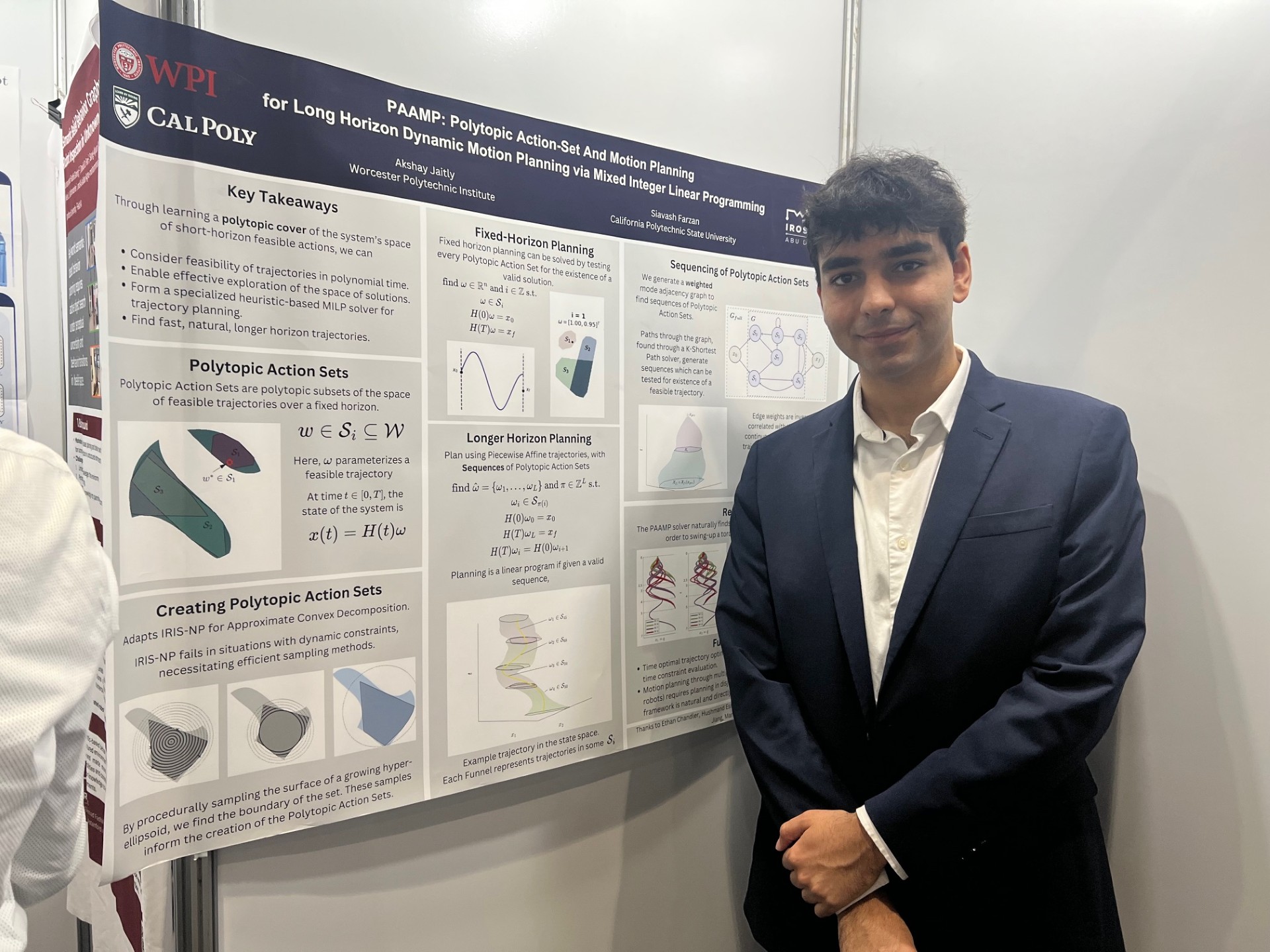
Polytopic Action and Motion Planning
— A Linear Approach to Long Horizon Dynamic (Non-Convex) Motion Planning.

Traditional Motion Planning and trajectory optimization methods in dynamic and underactuated systems often rely on solving complex nonlinear programs. For methods like Multiple Shooting, or Direct Collocation, these nonlinearities capture the considerations of highly nonlinear dynamics, or defect matching. With PAAMP, the considerations of dynamics and the problem of defect matching are both simplified to linear programs.
"Polytopic Action And Motion Planning" was developed as a form of athletic intelligence, used to simplify the long horizon trajectory optimization problem. While traditional techniques may use sequences of "motion primitives" as learned behaviors, PAAMP instead learns polytopic representations of behaviors (Polytopic Action Sets) using an adaptation of IRIS-NP.
Given a sequence of such Polytopic Action Sets, the Constraint Satisfaction Problem is a linear program. Thus the entire problem is approximated as a Mixed Integer Linear Program (MILP). The integer variable search can be informed by a sparse graph search, inspired by Multi-Modal Motion Planning problems.
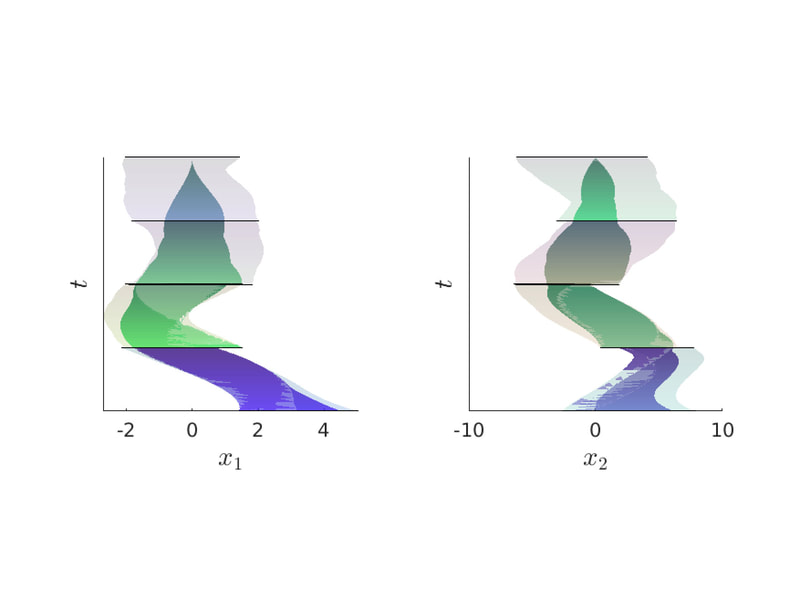
Results show a torque constrained pendulum naturally finding the behavior of energy shaping over a longer period of time at real time speeds (> 1000 Hz)